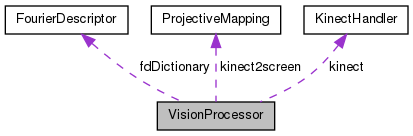
The VisionProcessor class performs image processing to the sensor data in order to detect the hands and the fingertips.
More...
#include <visionprocessor.h>
|
| virtual int | segmentScreen (const Mat &grayFrame, int Ith, float epsilon, vector< Point2i > &screenContours, Mat &maskShow) |
| |
|
| static const int | HAND_CLASS_ID =1 |
| |
| static const double | PI = 3.14159265358979323846 |
| |
The VisionProcessor class performs image processing to the sensor data in order to detect the hands and the fingertips.
| VisionProcessor::VisionProcessor |
( |
| ) |
|
| void VisionProcessor::createMaxDepthWithHistogram |
( |
int |
numFrames = 200 | ) |
|
|
virtual |
createMaxDepthWithHistogram generates a noise robust background map
- Parameters
-
| numFrames | number of frames to generate the histogram, 200 for default |
| Size2i VisionProcessor::getKinectResolution |
( |
| ) |
const |
| void VisionProcessor::getScreenTransformation |
( |
| ) |
|
|
virtual |
getScreenTransformation segments and creates the transformation for going from sensor space to screen space
| void VisionProcessor::init |
( |
int |
wRes = 1024, |
|
|
int |
hRes = 768 |
|
) |
| |
|
virtual |
init initializes the paramameters for the image processing algorithms
- Parameters
-
| wRes | is the width of the resolution the screen is working on, 1024 for default |
| hRes | is the height of the resolution the screen is working on, 768 for default |
| void VisionProcessor::processFrame |
( |
FrameData & |
frameData, |
|
|
double & |
processingDuration |
|
) |
| |
|
virtual |
processFrame waits for a frame and does the processing
- Parameters
-
| frameData | input/output variable with the frame data processed |
| processingDuration | output variable with processing time needed in seconds |
| int VisionProcessor::segmentScreen |
( |
const Mat & |
grayFrame, |
|
|
int |
Ith, |
|
|
float |
epsilon, |
|
|
vector< Point2i > & |
screenContours, |
|
|
Mat & |
maskShow |
|
) |
| |
|
protectedvirtual |
| int VisionProcessor::descriptorNum |
|
protected |
| int VisionProcessor::epsilon |
|
protected |
| Mat VisionProcessor::erodeK |
|
protected |
| float VisionProcessor::errorTolerance |
|
protected |
| const int VisionProcessor::HAND_CLASS_ID =1 |
|
staticprotected |
| int VisionProcessor::hResolution |
|
protected |
| Mat VisionProcessor::mask |
|
protected |
| float VisionProcessor::maxAreaContour |
|
protected |
| float VisionProcessor::maxAreaFinger |
|
protected |
| float VisionProcessor::maxCirc |
|
protected |
| Mat VisionProcessor::maxDepth |
|
protected |
| float VisionProcessor::maxDist2Class |
|
protected |
| float VisionProcessor::maxExcentricity |
|
protected |
| float VisionProcessor::minAreaContour |
|
protected |
| float VisionProcessor::minAreaFinger |
|
protected |
| Mat VisionProcessor::minDepthFinger |
|
protected |
| Mat VisionProcessor::minDepthHand |
|
protected |
| float VisionProcessor::minExcentricity |
|
protected |
| float VisionProcessor::minHandExc |
|
protected |
| const double VisionProcessor::PI = 3.14159265358979323846 |
|
staticprotected |
| vector<Point2f> VisionProcessor::screenContoursCorners |
|
protected |
| int VisionProcessor::sizes[2] |
|
protected |
| float VisionProcessor::thicknesFinger |
|
protected |
| float VisionProcessor::thicknessHand |
|
protected |
| float VisionProcessor::tolerance |
|
protected |
| bool VisionProcessor::useScreenSeg |
|
protected |
| int VisionProcessor::wResolution |
|
protected |
The documentation for this class was generated from the following files:
 1.8.3.1
1.8.3.1

